
线性结构篇
注意: 开始本篇学习之前,请确保你完成了 C语言程序设计 篇视频教程,否则无法进行学习。
我们本系列课程分为基础知识和算法实战两部分,其中算法实战在LeetCode上进行:https://leetcode.cn/,各位可以提前在平台上注册好相关账号。
学习完数据结构,各位小伙伴可以尝试参加算法相关的学科竞赛,如ICPC-ACM、蓝桥杯等,算法类的比赛含金量相比项目类比赛更高,也更有价值,相应的,算法类竞赛难道会更大一些,尤其是ICPC-ACM大学生程序设计竞赛,一般都是各个高校内顶尖级队伍进行参赛,甚至还有中学队伍(这类学生预定清华、北大),因为算法更加考验个人的思维能力和天赋水平,相比其他计算机基础课程,数据结构和算法是难度最高的,也是各大高校考研的重点内容。
不过虽然很难,并且考验个人天赋,但是大部分人通过努力学习是完全能够掌握基础部分的,在应对80%的题目时,是完全有机会解决的,所以,不要怀疑自己,说不定你就是下一个大佬。
这里也说一下面试推荐书籍,内含多种常用算法以及解题分析,值得一看:
本篇内容虽然继续以C语言为基础进行讲解,但是将不再涉及到C语言的语言层面相关内容,更多的是数据结构和算法的思想,实际上用任意一种语言都可以实现。
什么是数据结构与算法
回顾我们之前的C语言程序设计阶段,我们已经接触过基本数据类型,并且能够使用结构体对数据进行组织,我们可以很轻松地使用一个结构体来存放一个学生的完整数据,在数据结构学习阶段,我们还会进一步地研究。
数据结构
那么,我们来看看,什么是数据结构呢?
数据结构(data structure)是带有结构特性的数据元素的集合,它研究的是数据的逻辑结构和数据的物理结构以及它们之间的相互关系。
比如现在我们需要保存100个学生的数据,那么你首先想到的肯定是使用数组吧!没错,没有什么比数组更适合存放这100个学生的数据了,但是如果我们现在有了新的需求呢?我们不仅仅是存放这些数据,我们还希望能够将这些数据按顺序存放,支持在某个位置插入一条数据、删除一条数据、修改一条数据等,这时候,数组就显得有些乏力了。
我们需要一种更好的数据表示和组织方式,才能做到类似于增删改查这样的操作,而完成这些操作所用到的方法,我们称其为“算法”,所以数据结构和算法,一般是放在一起进行讲解的。
算法
比如现在我们希望你求出1-100所有数字的和,请通过程序来实现:
int main() {
int sum = 0;
for (int i = 1; i <= 100; ++i) sum += i;
printf("%d", sum);
}我们很容易就能编写出这样的程序,实际上只需要一个for循环就能搞定了,而这就是我们设计的算法。

在之前的C语言程序设计阶段,我们其实已经学习了许多算法,包括排序算法、动态规划等。
当然,解决问题的算法并不是只有一种,实际上我们上面的方式并不是最优的算法,如果想要求得某一段整数的和,其实使用高斯求和公式能够瞬间得到结果:
\sum=\frac{(首项+末项)\times项数}{2}
所以,我们完全没必要循环那么多次进行累加计算,而是直接使用数学公式:
int main() {
printf("%d", (1 + 100) * 100 / 2);
}所以,算法的尽头还得是数学啊。
可见,不同的算法,执行的效率也是有很大差别的,这里我们就要提到算法的复杂度了。衡量一个算法的复杂程度需要用到以下两个指标:
- 时间复杂度
T(n):算法程序在执行时消耗的时间长度,一般与输入数据的规模n有关。 - 空间复杂度
S(n):算法程序在执行时占用的存储单元长度,同样与数据的输入规模n有关,大部分情况下,我们都是采取空间换时间的算法。
比如我们上面的两种算法,第一种需要执行n次循环,每轮循环进行一次累加操作,而第二种只需要进行一次计算即可。实际中我们计算时间复杂度时,其实并不一定要计算精确的执行次数,而只需要大概执行次数,那么这里我们使用O渐进表示法。
- 大O符号(Big O notation):是用于描述函数渐进行为的数学符号。
而这里的循环次数,实际上就是我们需要知道的大致执行次数,所以第一种算法的时间复杂度为:O(n),其中n就是项数,因为它需要执行n次计算才能得到最后的结果。而第二种算法的时间复杂度为:O(1),因为它只需要执行一次计算(更准确的说它的执行次数是一个常数,跟项数n毫无关系),显然,当n变得非常大时,第二种方法的计算速度远超第一种。
再比如我们之前使用的冒泡排序算法,需要进行两轮循环,而循环的次数在经过优化之后为(n - 1)(n - 1)/2,得到的结果中包含了一个n的平方,此时这种算法的时间复杂度就来到O(n^2)了。
在不同的空间复杂度下,可能n小的时候还没什么感觉,但是当n变得非常大时,差距就不是一点半点了,我们来看看常用函数的增长曲线:
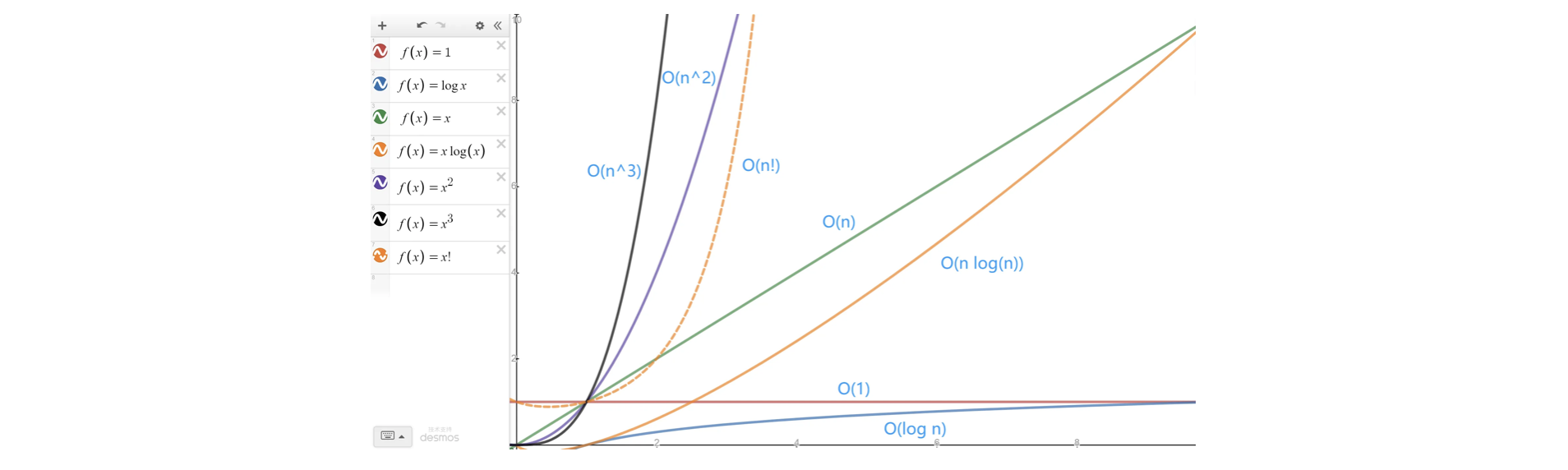
所以我们在设计算法的时候,一定要考虑到时间和空间复杂度的问题,这里列出常用函数的增长表:
| 函数 | 类型 | 解释 |
|---|---|---|
| \Omicron(1) | 常数阶 | 如果算法能够优化到这个程度,那么基本上算是最快的算法了。 |
| \Omicron(\log_{2}n) | 对数阶 | 仅次于常数阶的速度,我们后面会介绍的二分搜索算法,就能够到达这个级别。 |
| \Omicron(n) | 线性阶 | 我们后面介绍的线性表插入、删除数据,包括动态规划类算法能够达到线性阶。 |
| \Omicron(n\log_{2}n) | 线性对数阶 | 相当于在对数阶算法外层套了一层线性阶循环。 |
| \Omicron(n^2) | 平方阶 | 我们前面学习的冒泡排序,需要进行两重循环,实际上就是平方阶。 |
| \Omicron(n^3) | 立方阶 | 从立方阶开始,时间复杂度就开始变得有点大了。 |
| \Omicron(2^n) | 指数阶 | 我们前面介绍的斐波那契数列递归算法,就是一个指数阶的算法,因为它包含大量的重复计算。 |
| \Omicron(n!) | 阶乘 | 这个增长速度比指数阶还恐怖,但是一般很少有算法能达到这个等级。 |
我们在编写算法时,一定要注意算法的时间复杂度,当时间复杂度太大时,可能计算机就很难在短时间内计算出结果了。
案例:二分搜索算法
现在有一个从小到大排序的数组,给你一个目标值target,现在请你找到这个值在数组中的对应下标,如果没有,请返回-1:
int search(int* nums, int numsSize, int target){
//请实现查找算法
}
int main() {
int arr[] = {1, 3, 4, 6, 7,8, 10, 11, 13, 15}, target = 3;
printf("%d", search(arr, 10, target));
}此时,最简单的方法就是将数组中的元素一个一个进行遍历,总有一个是,如果遍历完后一个都没有,那么就结束:
int search(int* nums, int numsSize, int target){
for (int i = 0; i < len; ++i) {
if(nums[i] == target) return i; //循环n次,直到找到为止
}
return -1;
}虽然这样的算法简单粗暴,但是并不是最好的,我们需要遍历n次才能得到结果,时间复杂度为\Omicron(n),我们可以尝试将其优化到更低的时间复杂度。这里我们利用它有序的特性,实际上当我们查找到大于目标target的数时,就没必要继续寻找了:
int search(int* nums, int numsSize, int target){
for (int i = 0; i < len; ++i) {
if(nums[i] == target) return i;
if(nums[i] > target) break;
}
return -1;
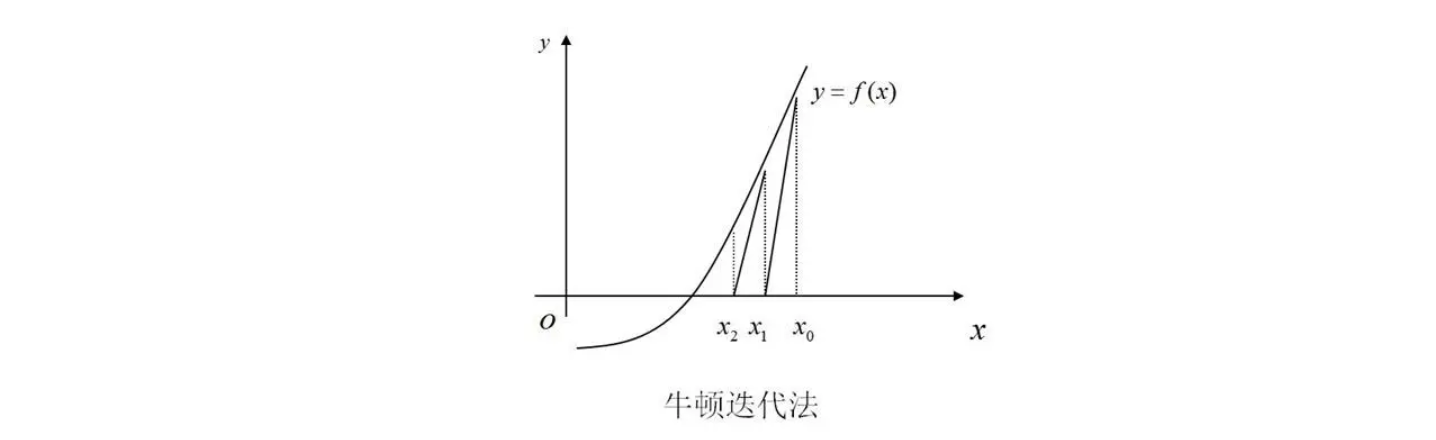
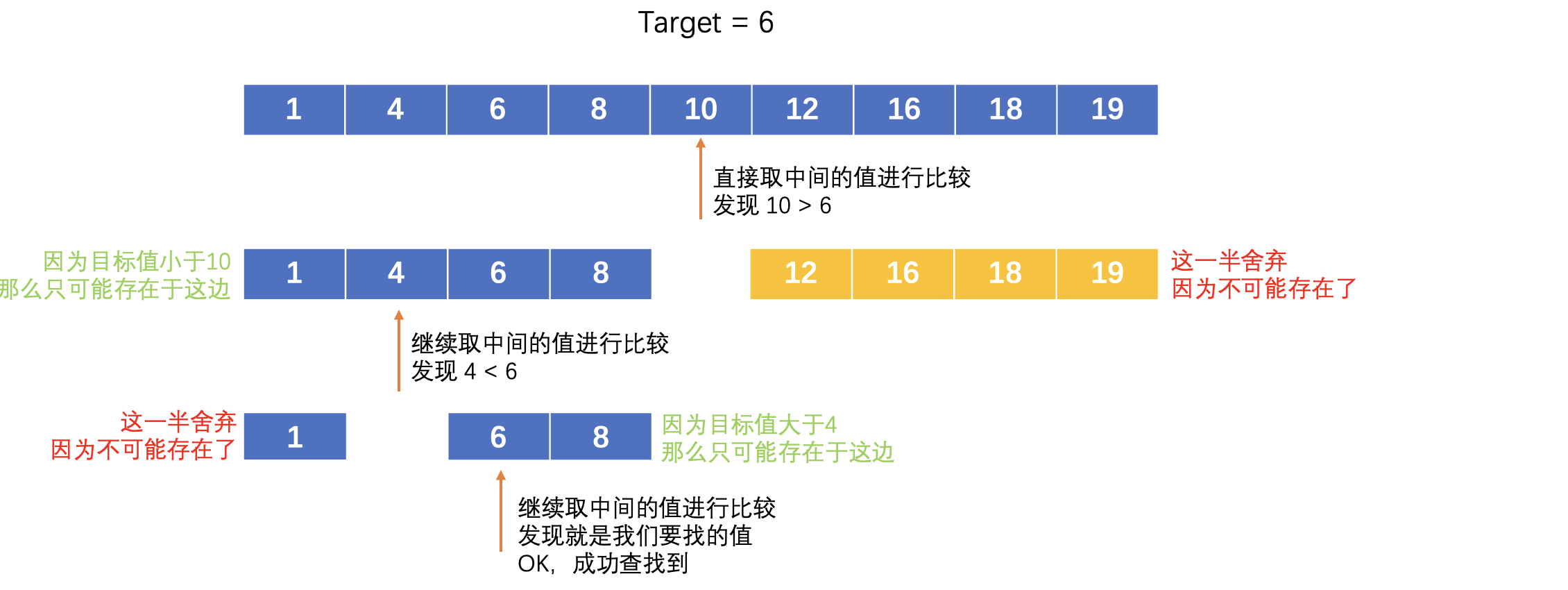
}这样循环进行的次数也许就会减小了,但是如果我们要寻找的目标target刚好是最后几个元素呢?这时时间复杂度又来到到了\Omicron(n),那么有没有更好的办法呢?我们依然可以继续利用数组有序的特性,既然是有序的,那么我们不妨随机在数组中找一个数,如果这个数大于目标,那么就不再考虑右边的部分,如果小于目标,那么就考虑左边的部分,然后继续在另一部分中再次随机找一个数,这样每次都能将范围缩小,直到找到为止(其思想就比较类似于牛顿迭代法,再次强调数学的重要性)
而二分思想就是将一个有序数组不断进行平分,直到找到为止,这样我们每次寻找的范围会不断除以2,所以查找的时间复杂度就降到了\Omicron(\log_{2}n),相比一个一个比较,效率就高了不少:
好了,那么现在我们就可以利用这种思想,编写出二分搜索算法了,因为每一轮都在进行同样的搜索操作,只是范围不一样,所以这里直接采用递归分治算法:
int binarySearch(int * nums, int target, int left, int right){ //left代表左边界,right代表右边界
if(left > right) return -1; //如果左边大于右边,那么肯定就找完了,所以直接返回
int mid = (left + right) / 2; //这里计算出中间位置
if(nums[mid] == target) return mid; //直接比较,如果相等就返回下标
if(nums[mid] > target) //这里就是大于或小于的情况了,这里mid+1和mid-1很多人不理解,实际上就是在下一次寻找中不算上当前的mid,因为这里已经比较过了,所以说左边就-1,右边就+1
return binarySearch(nums, target, left, mid - 1); //如果大于,那么说明肯定不在右边,直接去左边找
else
return binarySearch(nums, target, mid + 1, right); //如果小于,那么说明肯定不在左边,直接去右边找
}
int search(int* nums, int numsSize, int target){
return binarySearch(nums, target, 0, numsSize - 1);
}当然也可以使用while循环来实现二分搜索,如果需要验证自己的代码是否有问题,可以直接在力扣上提交代码:https://leetcode.cn/problems/binary-search/
线性表
那么作为数据结构的开篇,我们就从最简单的线性表开始介绍。
还记得我们开篇提了一个问题吗?
我们还希望能够将这些数据按顺序存放,支持在某个位置插入一条数据、删除一条数据、修改一条数据等,这时候,数组就显得有些乏力了。
数组无法做到这么高级的功能,那么我们就需要定义一种更加高级的数据结构来做到,我们可以使用线性表(Linear List)
线性表是由同一类型的数据元素构成的有序序列的线性结构。线性表中元素的个数就是线性表的长度,表的起始位置称为表头,表的结束位置称为表尾,当一个线性表中没有元素时,称为空表。
线性表一般需要包含以下功能:
- 初始化线性表: 将一个线性表进行初始化,得到一个全新的线性表。
- 获取指定位置上的元素: 直接获取线性表指定位置
i上的元素。 - 获取元素的位置: 获取某个元素在线性表上的位置
i。 - 插入元素: 在指定位置
i上插入一个元素。 - 删除元素: 删除指定位置
i上的一个元素。 - 获取长度: 返回线性表的长度。
也就是说,现在我们需要设计的是一种功能完善的表结构,它不像是数组那么低级,而是真正意义上的表:

简单来说它就是列表,比如我们的菜单,我们在点菜时就需要往菜单列表中添加菜品或是删除菜品,这时列表就很有用了,因为数组长度固定、操作简单,而我们添加菜品、删除菜品这些操作又要求长度动态变化、操作多样。
那么,如此高级的数据结构,我们该如何去实现呢?实现线性表的结构一般有两种,一种是顺序存储实现,还有一种是链式存储实现,我们先来看第一种,也是最简单的的一种。
顺序表
前面我们说到,既然数组无法实现这样的高级表结构,那么我就基于数组,对其进行强化,也就是说,我们存放数据还是使用数组,但是我们可以为其编写一些额外的操作来强化为线性表,像这样底层依然采用顺序存储实现的线性表,我们称为顺序表。

这里我们可以先定义一个新的结构体类型,将一些需要用到的数据保存在一起,这里我们以int类型的线性表为例:
typedef int E; //这里我们的元素类型就用int为例吧,先起个别名
struct List {
E array[10]; //实现顺序表的底层数组
int capacity; //表示底层数组的容量
};为了一会使用方便,我们可以给其起一个别名:
typedef struct List * ArrayList; //因为是数组实现,所以就叫ArrayList,这里直接将List的指针起别名然后我们就可以开始编写第一个初始化操作了:
void initList(ArrayList list){
list->capacity = 10; //直接将数组的容量设定为10即可
}但是我们发现一个问题,这样的话我们的顺序表长度不就是固定为10的了吗?而前面我们线性表要求的是长度是动态增长的,那么这个时候怎么办呢?我们可以直接使用一个指针来指向底层数组的内存区域,当装不下的时候,我们可以创建一个新的更大的内存空间来存放数据,这样就可以实现扩容了,所以我们来修改一下:
struct List {
E * array; //指向顺序表的底层数组
int capacity; //数组的容量
};接着我们修改一下初始化函数:
void initList(ArrayList list){ //这里就默认所有的顺序表初始大小都为10吧,随意
list->array = malloc(sizeof(E) * 10); //使用malloc函数申请10个int大小的内存空间,作为底层数组使用
list->capacity = 10; //容量同样设定为10
}但是还没完,因为我们的表里面,默认情况下是没有任何元素的,我们还需要一个变量来表示当前表中的元素数量:
struct List {
E * array; //指向顺序表的底层数组
int capacity; //数组的容量
int size; //表中的元素数量
};
typedef struct List * ArrayList;
void initList(ArrayList list){ //这里就默认所有的顺序表初始大小都为10吧,随意
list->array = malloc(sizeof(int) * 10); //使用malloc函数申请10个int大小的内存空间,作为底层数组使用
list->capacity = 10; //容量同样设定为10
list->size = 0; //元素数量默认为0
}还有一种情况我们需要考虑,也就是说如果申请内存空间失败,那么需要返回一个结果告诉调用者:
_Bool initList(ArrayList list){
list->array = malloc(sizeof(int) * 10);
if(list->array == NULL) return 0; //需要判断如果申请的结果为NULL的话表示内存空间申请失败
list->capacity = 10;
list->size = 0;
return 1; //正常情况下返回true也就是1
}这样,一个比较简单的顺序表就定义好,我们可以通过initList函数对其进行初始化:
int main() {
struct List list; //创建新的结构体变量
if(initList(&list)){ //对其进行初始化,如果失败就直接结束
...
} else{
printf("顺序表初始化失败,无法启动程序!");
}
}接着我们来编写一下插入和删除操作,对新手来说也是比较难以理解的操作:

我们先设计好对应的函数:
void insertList(ArrayList list, E element, int index){
//list就是待操作的表,element就是需要插入的元素,index就是插入的位置(注意顺序表的index是按位序计算的,从1开始,一般都是第index个元素)
}我们按照上面的思路来编写一下代码:
void insertList(ArrayList list, E element, int index){
for (int i = list->size; i > index - 1; i--) //先使用for循环将待插入位置后续的元素全部丢到后一位
list->array[i] = list->array[i - 1];
list->array[index - 1] = element; //挪完之后,位置就腾出来了,直接设定即可
list->size++; //别忘了插入之后相当于多了一个元素,记得size + 1
}现在我们可以来测试一下了:
void printList(ArrayList list){ //编写一个函数用于打印表当前的数据
for (int i = 0; i < list->size; ++i) //表里面每个元素都拿出来打印一次
printf("%d ", list->array[i]);
printf("\n");
}int main() {
struct List list;
if(initList(&list)){
insertList(&list, 666, 1); //每次插入操作后都打印一下表,看看当前的情况
printList(&list);
insertList(&list, 777, 1);
printList(&list);
insertList(&list, 888, 2);
printList(&list);
} else{
printf("顺序表初始化失败,无法启动程序!");
}
}运行结果如下:

虽然这样看起来没什么问题了,但是如果我们在非法的位置插入元素会出现问题:
insertList(&list, 666, -1); //第一个位置就是0,怎么可能插入到-1这个位置呢,这样肯定是不正确的,所以我们需要进行判断
printList(&list);我们需要检查一下插入的位置是否合法:

转换成位序,也就是[1, size + 1]这个闭区间,所以我们在一开始的时候进行判断:
_Bool insertList(ArrayList list, E element, int index){
if(index < 1 || index > list->size + 1) return 0; //如果在非法位置插入,返回0表示插入操作执行失败
for (int i = list->size; i > index - 1; i--)
list->array[i] = list->array[i - 1];
list->array[index - 1] = element;
list->size++;
return 1; //正常情况返回1
}我们可以再来测试一下:
if(insertList(&list, 666, -1)){
printList(&list);
} else{
printf("插入失败!");
}
不过我们还是没有考虑到一个情况,那么就是如果我们的表已经装满了,也就是说size已经达到申请的内存空间最大的大小了,那么此时我们就需要考虑进行扩容了,否则就没办法插入新的元素了:
_Bool insertList(ArrayList list, E element, int index){
if(index < 1 || index > list->size + 1) return 0;
if(list->size == list->capacity) { //如果size已经到达最大的容量了,肯定是插不进了,那么此时就需要扩容了
int newCapacity = list->capacity + (list->capacity >> 1); //我们先计算一下新的容量大小,这里我取1.5倍原长度,当然你们也可以想扩多少扩多少
E * newArray = realloc(list->array, sizeof(E) * newCapacity); //这里我们使用新的函数realloc重新申请更大的内存空间
if(newArray == NULL) return 0; //如果申请失败,那么就确实没办法插入了,只能返回0表示插入失败了
list->array = newArray;
list->capacity = newCapacity;
}
for (int i = list->size; i > index - 1; i--)
list->array[i] = list->array[i - 1];
list->array[index - 1] = element;
list->size++;
return 1;
}realloc函数可以做到控制动态内存开辟的大小,重新申请的内存空间大小就是我们指定的新的大小,并且原有的数据也会放到新申请的空间中,所以非常方便。当然如果因为内存不足之类的原因导致内存空间申请失败,那么会返回NULL,所以别忘了进行判断。
这样,我们的插入操作就编写完善了,我们可以来测试一下:
int main() {
struct List list;
if(initList(&list)){
for (int i = 0; i < 30; ++i)
insertList(&list, i, i);
printList(&list);
} else{
printf("顺序表初始化失败,无法启动程序!");
}
}成功得到结果:

这样,我们就完成了顺序表的插入操作,接着我们来编写一下删除操作,其实删除操作也比较类似,也需要对元素进行批量移动,但是我们不需要考虑扩容问题,我们先设计好函数:
void deleteList(ArrayList list, int index){
//list就是待操作的表,index是要删除的元素位序
}按照我们上面插入的思路,我们反过来想一想然后实现删除呢?首先是删除的范围:

换算成位序就是[1, size]这个闭区间内容,所以我们先来限定一下合法范围:
_Bool deleteList(ArrayList list, int index){
if(index < 1 || index > list->size) return 0;
return 1; //正常情况返回1
}接着就是删除元素之后,我们还需要做什么呢?我们应该将删除的这个元素后面的全部元素前移一位:
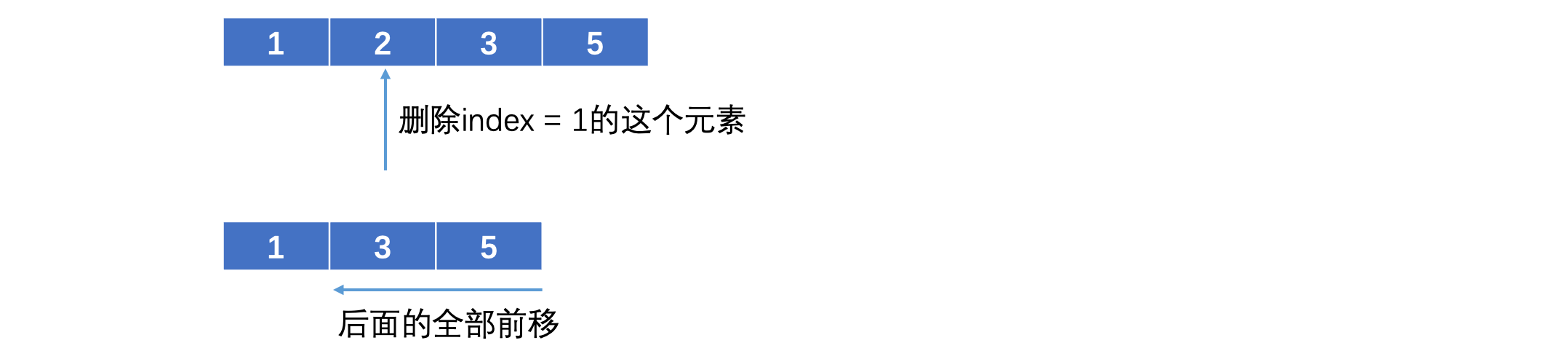
我们按照这个思路,来编写一下删除操作:
_Bool deleteList(ArrayList list, int index){
if(index < 1 || index > list->size) return 0;
for (int i = index - 1; i < list->size - 1; ++i)
list->array[i] = list->array[i + 1]; //实际上只需要依次把后面的元素覆盖到前一个即可
list->size--; //最后别忘了size - 1
return 1;
}删除相比插入要简单一些,我们来测试一下吧:
for (int i = 0; i < 10; ++i) //先插10个
insertList(&list, i, i);
deleteList(&list, 5); //这里删除5号元素
printList(&list);成功得到结果:

OK,那么插入和删除操作我们就成功完成了,还有一些比较简单的功能,我们这里也来依次实现一下,首先是获取长度:
int sizeList(ArrayList list){
return list->size; //直接返回size就完事
}接着是按位置获取元素和查找指定元素的位置:
E * getList(ArrayList list, int index){
if(index < 1 || index > list->size) return NULL; //如果超出范围就返回NULL
return &list->array[index - 1];
}int findList(ArrayList list, E element){
for (int i = 0; i < list->size; ++i) { //一直遍历,如果找到那就返回位序
if(list->array[i] == element) return i + 1;
}
return -1; //如果遍历完了都没找到,那么就返回-1
}这样,我们的线性表就实现完成了,完整代码如下:
#include <stdio.h>
#include <stdlib.h>
typedef int E;
struct List {
E * array;
int capacity;
int size;
};
typedef struct List * ArrayList;
_Bool initList(ArrayList list){
list->array = malloc(sizeof(E) * 10);
if(list->array == NULL) return 0;
list->capacity = 10;
list->size = 0;
return 1;
}
_Bool insertList(ArrayList list, E element, int index){
if(index < 1 || index > list->size + 1) return 0;
if(list->size == list->capacity) {
int newCapacity = list->capacity + (list->capacity >> 1);
E * newArray = realloc(list->array, newCapacity * sizeof(E));
if(newArray == NULL) return 0;
list->array = newArray;
list->capacity = newCapacity;
}
for (int i = list->size; i > index - 1; --i)
list->array[i] = list->array[i - 1];
list->array[index - 1] = element;
list->size++;
return 1;
}
_Bool deleteList(ArrayList list, int index){
if(index < 1 || index > list->size) return 0;
for (int i = index - 1; i < list->size - 1; ++i)
list->array[i] = list->array[i + 1];
list->size--;
return 1;
}
int sizeList(ArrayList list){
return list->size;
}
E * getList(ArrayList list, int index){
if(index < 1 || index > list->size) return NULL;
return &list->array[index - 1];
}
int findList(ArrayList list, E element){
for (int i = 0; i < list->size; ++i) {
if(list->array[i] == element) return i + 1;
}
return -1;
}问题: 请问顺序实现的线性表,插入、删除、获取元素操作的时间复杂度为?
- 插入: 因为要将后续所有元素都向后移动,所以平均时间复杂度为O(n)
- 删除: 同上,因为要将所有元素向前移动,所以平均时间复杂度为O(n)
- 获取元素: 因为可以利用数组特性直接通过下标访问到对应元素,所以时间复杂度为O(1)
顺序表习题:
-
在一个长度为
n的顺序表中,向第i个元素前插入一个新的元素时,需要向后移动多少个元素?A.
n - iB.n - i + 1C.n - i - 1D.i注意这里要求的是向第
i个元素前插入(第i个表示的是位序,不是下标,不要搞混了,第1个元素下标就为0),这里我们假设n为3,i为2,那么也就是说要在下标为1的这个位置上插入元素,那么就需要移动后面的2个元素,所以答案是B -
顺序表是一种( )的存储结构?
A. 随机存取 B. 顺序存取 C. 索引存取 D. 散列存取
首先顺序表底层是基于数组实现的,那么它肯定是支持随机访问的,因为我们可以直接使用下标想访问哪一个就访问哪一个,所以选择A,不要看到名字叫做顺序表就选择顺序存取,因为它并不需要按照顺序来进行存取,链表才是。这里也没有建立索引去访问元素,也更不可能是散列存取了,散列存取我们会在后面的哈希表中进行介绍